
|
The ultimate success of search algorithms as tools for design automation is critically dependent on their scaling properties. Any open-ended design problem that is based only on the direct composition of elementary building blocks grows combinatorially complex with the size of the problem and search algorithms that use such an encoding will not scale to complex tasks. In this project we propose the use of generative encodings as a way to evolve objects with modularity and reuse of parts. Using this system we evolve tables and locomoting robots, called genobots.
|
|
| A trend in robotics is towards legged robots. One of the issues with legged robots is the development of gaits. Typically gaits are developed manually. In this project we report our results of autonomous evolution of dynamic gaits for the Sony Quadruped Robot. Fitness is determined using the robot's digital camera and infrared sensors. Evolved gaits are faster than those created by hand. Using this technique we evolve a gait used in the consumer version of AIBO. |
 |
|
We believe that not just the software, but also the physical
body of a robot could be the result of an evolutionary
process.
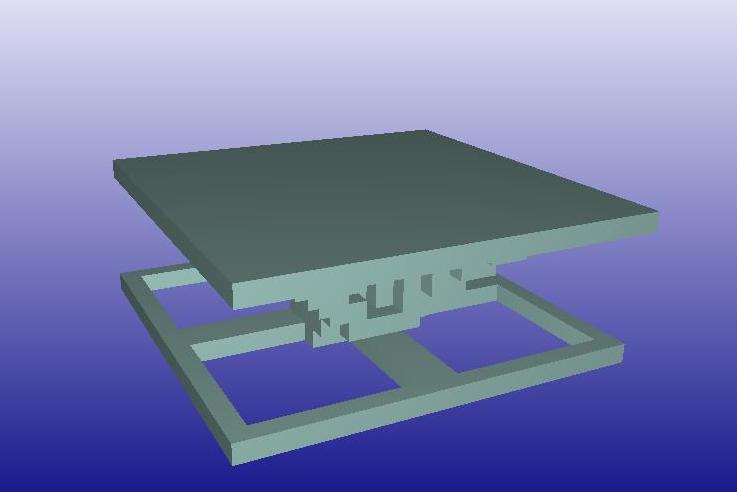
A step in this direction is the evolution of buildable lego structures, designed by the computer through the combination of genetic algorithms and physical simulation. Examples of evolved structures are: the Lego Bridge that supports its weight on one side to reach the other; a crane and a table. EvoCAD is an interactive building tool where computer and human collaborate in creating a design. See also our project on the evolution of machines.
|
|
We define embodied evolution (EE) as evolution taking place in a population of robots. Further, we stipulate that the evolutionary algorithm is to execute in a distributed and asynchronous manner within the population, as in natural evolution. Thus, algorithms that centrally maintain and manipulate the specifications of individual agents are not permitted. We wish to create a population of physical robots that perform their tasks and evolve hands-free – without human intervention of any kind, as Husbands (1992) articulates. Here, we introduce our conception of embodied evolution and report the initial results of experiments that provide the first proof-of-concept for EE.
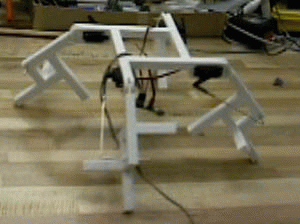
| In the Golem project (Genetically Organized Lifelike Electro Mechanics) we conducted a set of experiments in which simple electro-mechanical systems evolved from scratch to yield physical locomoting machines. Like biological lifeforms whose structure and function exploit the behaviors afforded by their own chemical and mechanical medium, our evolved creatures take advantage of the nature of their own medium - thermoplastic, motors, and artificial neurons. We thus achieve autonomy of design and construction using evolution in a limited universe physical simulation, coupled to off-the-shelf rapid manufacturing technology. This is the first time robots have been robotically designed and robotically fabricated. |
 |
 |
|
This project addresses the problem of creating neural controllers
for robots. The first part of this project involved developing controllers for simple robots to perform a simple task - pole balancing and Luxo locomotion. In the second part we move to more complex robots performing the more complex task of pursuit and evasion. Finally we show that we can evolve controllers in simulation that transfer to complex robots, such as AIBO. |
|
 demoweb@demo.cs.brandeis.edu
demoweb@demo.cs.brandeis.edu